|
Средства
обеспечения работ с полезным грузом: система
бортовых манипуляторов "Аист"
Манипулятор для космического
корабля "Буран" был разработан в Государственном научном центре - Центральном
научно-исследовательском и опытно-конструкторском институте робототехники и технической кибернетики (ГНЦ ЦНИИ РТК РФ) (Санкт-Петербург).
Это учреждение было организовано в конце 1960-х годов на основе Опытного
конструкторского бюро технической кибернетики.



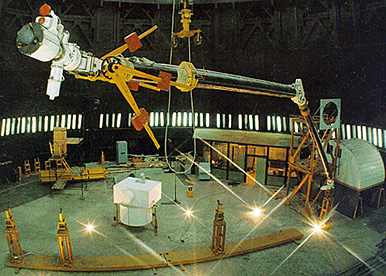
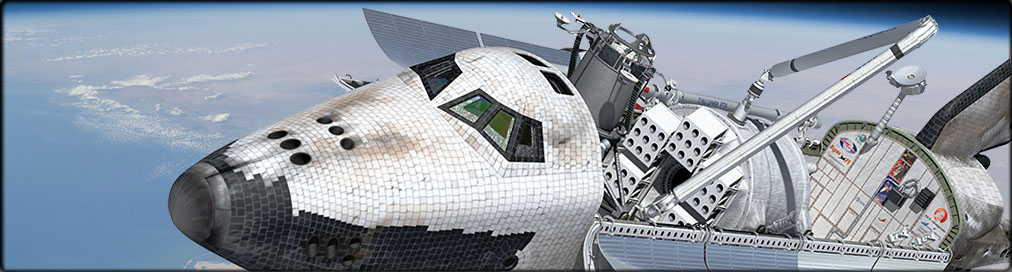
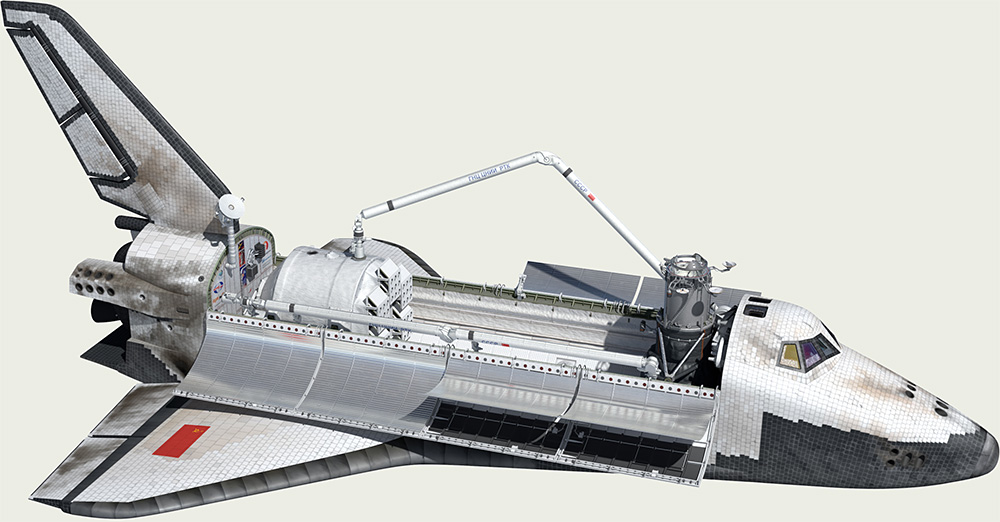
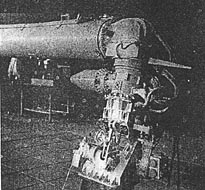
Манипулятор "Бурана" на испытаниях на
стенде, имитирующем невесомость. На фотографии
видно, что манипулятор установлен по правому борту корабля и фиксируется
в транспортном положении тремя узлами, поддерживающими манипулятор в
подвижных сочленениях звеньев. |
Для проведения
испытаний в институте создали уникальный стенд (фото
справа). Манипулятор, предназначенный для работы в открытом космосе, размещают
на платформу, опирающуюся на воздушную подушку. Подобным образом проверяют и
отрабатывают перемещение различных грузов в условиях искусственной невесомости.
Манипулятор общей длиной (в "вытянутом" транспортном положении) 15 метров
действует в трех плоскостях и имеет шесть вращательных степеней свободы. Система
бортовых манипуляторов (СБМ) орбитального корабля состоит из двух манипуляторов
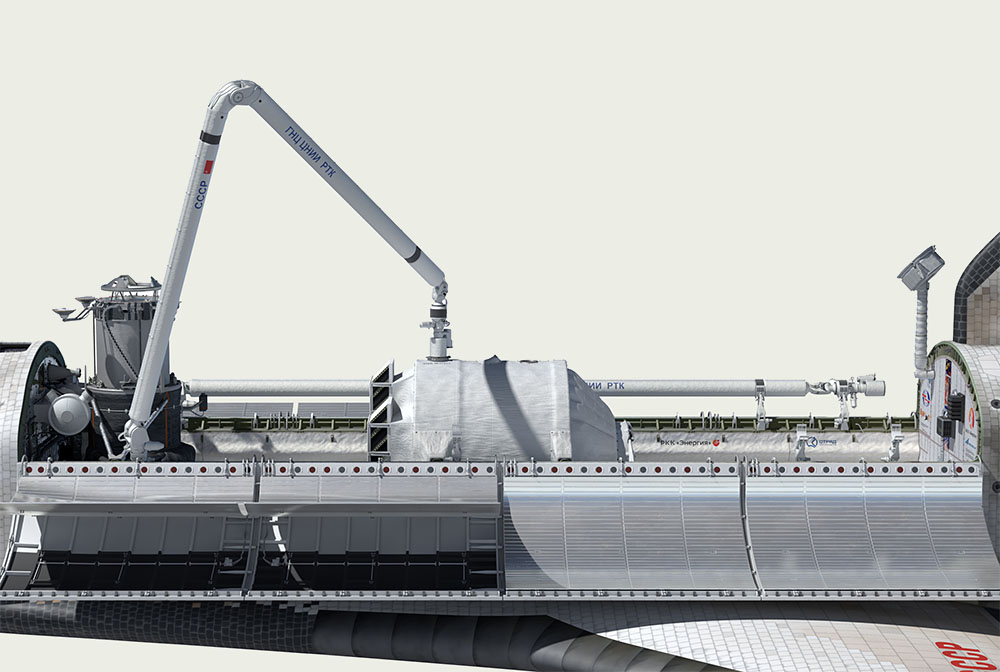
весом по 360 кг - основного и резервного. На конце каждого манипулятора
смонтирован захват, которым удерживается и перемещается полезный груз, при этом
за ходом операции оператор наблюдает с помощью двух независимых телекамер,
поворачивающихся в двух плоскостях, а прожектор освещает захват и нужное место
на наружной поверхности космического аппарата или орбитальной станции.
Бурановский манипулятор имеет
кинематическую схему, сходную с манипулятором
Space Shuttle
(RMS). Кроме шести вращательных степеней
подвижности,
он имеет одну транспортную степень (для начальной установки в грузовом отсеке
корабля при закрытых створках грузового отсека). Звенья манипулятора ("плечо" и
"локоть") выполнены шарнирно-стержневыми из легких, но прочных композиционных
материалов (углепластика), которые приспособлены для космических условий с
резким перепадом температур.
Управление манипулятором
осуществляется через коммутатор, связанный с приводами звеньев и
бортовым цифровым вычислительным комплексом (БЦВК), что позволяет
использовать несколько режимов управления.
В режиме ручного управления
действиями манипулятора руководит оператор с помощью двух рукояток на пульте
управления манипуляторами, расположенном на задней стенке в
командном отсеке кабины корабля. Одна рукоятка обеспечивает перемещение
собственно манипулятора, а другая связана непосредственно с захватами. Контроль
за операцией оператор осуществляет с помощью уже упомянутой выносной
телевизионной системы.
В автоматическом режиме
управления манипулятор действует по заложенной в
БЦВК программе. При этом БЦВК
осуществляет связь манипулятора с оборудованием, размещенным вне корабля,
рассчитывает оптимальную траекторию и требуемую скорость перемещения захватов с
грузом, непрерывно контролируя работу всей системы, и при необходимости, внося
необходимые коррективы.
В режиме целеуказания
манипулятор может самостоятельно переместить захваты с полезным грузом в заранее
заданную точку пространства.
Предусмотрен и резервный режим
работы, при котором управляющие команды поступают на каждый шарнир манипулятора.
В отличие от своего американского
аналога
RMS, манипулятор "Бурана" имеет одну принципиальную
особенность - он может управляться не только с борта орбитального корабля, но и
с Земли. В этом случае в процессе работы из космоса напрямую в наземный Центр
управления полетом (ЦУП) "сбрасывается" большой объем телеметрической информации,
которая мгновенно анализируется, обрабатывается и полученные команды столь же
быстро отправляются на орбиту и поступают в блок памяти
БЦВК, откуда они передаются на манипулятор. Таким
образом, оператор, находящийся в ЦУПе, сможет производить работы в открытом
космосе с борта корабля, выполняющего непилотируемый автоматический полет.
|
Технические характеристики |
| Число
степеней свободы |
6 вращательных |
|
Грузоподемность, т |
30 |
| Рабочая
зона |
сфера радиусом 15,5 м |
Максимальная скорость, см/сек:
с грузом
без груза |
10
30 |
| Точность
позиционирования, см |
3 |
Что же касается программ, помещаемых
в блоках памяти БЦВК, то разработчики предусмотрели их
хранение в основном и дополнительных блоках. Такое решение позволяет гибко
планировать программу полета в зависимости от наличия или отсутствия экипажа на
борту корабля.
В связи с закрытием программы
"Энергия-Буран" манипулятор орбитального
корабля так и не был испытан в условиях космического полета (в
первом и единственном полете "Бурана" он
не устанавливался, а второй полет в декабре 1991
г., в котором предусматривалось его испытание, так и не состоялся),
однако проведенное наземное натурное и компьютерное моделирование позволило
определить следующие особенности его движения:
- движение
пустого схвата сопровождается колебаниями с амплитудой 7-10 см и частотой 0.5-1
Гц;
- при
работе с грузом около 1 т амплитуда колебаний схвата за счет суммарной упругости
(основная упругость сосредоточена в шарнирах и в схвате в месте крепления груза)
составила 50 см;
-
остановка груза весом 1.5 т и 6 т сопровождается
колебательным переходным процессом со временем затухания порядка 2 и 4 минут
соответственно.
Далее мы приводим иллюстрации из различных
источников, предоставленные В.Лебедевым
Крепление бортового манипулятора:
Бортовой манипулятор
(цветные фотографии сделаны в помещении
ВНИИТрансМаш, г.Санкт-Петербург, и публикуются с разрешения Прыгичева Т.В.):
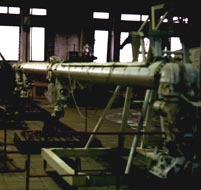
Вид с корневого ("плечевого") узла крепления вдоль
манипулятора |

Вид на среднюю часть манипулятора |

Вид на "кистевую" часть манипулятора |
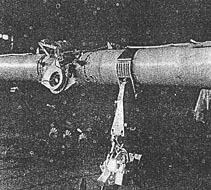
Вид на "локтевой сустав" манипулятора |
Вид на "плечевой сустав" манипулятора |

Вид на "кистевую" часть манипулятора |

Демонстрация бортового манипулятора на одной из выставок |

Вид на "кистевую" часть манипулятора |
Для испытаний
манипулятора в ГНЦ ЦНИИ РТК было построено специальное сооружение, позволявшее
за счет специальной системы обезвешивания имитировать состояние невесомости, и
производить наземную отработку манипулятора в условиях, максимально приближенных
к натурным условиям реального космического полета:
|