 Схема
полета на участке посадки "Бурана"
Схема
полета на участке посадки "Бурана"
Схема
полета на участке посадки "Бурана"
После завершения орбитального полета происходит торможение орбитального корабля (ОК) с помощью двигателей орбитального маневрирования (ДОМ) и переход на траекторию схода с орбиты с учетом входа в атмосферу под углом атаки a=390, обеспечивающим допустимый тепловой режим. По достижении условной границы атмосферы на высоте 100 км начинается участок спуска ОК.
 С помощью управляющих
двигателей (УД) ОК разворачивается по крену
таким образом, чтобы уменьшить боковую дальность
до взлетно-посадочной полосы (ВПП) посадочного
комплекса (ПК). В начале спуска, когда
отсутствует управление продольной дальностью
полета, ОК движется с постоянным скоростным
углом крена, при этом углы атаки, скольжения и
крена стабилизируются с помощью 20 УД,
размещенных в хвостовой части фюзеляжа (в двух кормовых блоках), а после входа в
атмосферу - аэродинамическими органами
управления (элевонами, работающими в режиме руля
высоты и в режиме элевонов, и балансировочным
щитком).
С помощью управляющих
двигателей (УД) ОК разворачивается по крену
таким образом, чтобы уменьшить боковую дальность
до взлетно-посадочной полосы (ВПП) посадочного
комплекса (ПК). В начале спуска, когда
отсутствует управление продольной дальностью
полета, ОК движется с постоянным скоростным
углом крена, при этом углы атаки, скольжения и
крена стабилизируются с помощью 20 УД,
размещенных в хвостовой части фюзеляжа (в двух кормовых блоках), а после входа в
атмосферу - аэродинамическими органами
управления (элевонами, работающими в режиме руля
высоты и в режиме элевонов, и балансировочным
щитком).
В начале спуска аэродинамические органы управления обеспечивают только балансировку ОК, а при достижении скоростным напором значения q=10 кг/м2 подключаются и к управлению угловым движением, причем по мере возрастания эффективности аэродинамических органов управления и скоростного напора они постепенно берут на себя функции управляющих двигателей. Для минимизации расхода топлива УД отключаются при q=50 кг/м2 в канале крена и при q=100 кг/м2 в продольном канале (смотри "Аэродинамика Бурана").
При достижении продольной перегрузкой
заданного значения начинается участок спуска с
управлением дальностью, при этом на основе
прогноза движения ОК отыскивается
"попадающая" в район ВПП ПК
траектория, на которой прогнозируемая дальность
спуска равна оставшейся дальности при
выполнении ограничений по нагреву, скоростному
напору и перегрузкам.
Специальный алгоритм
управления вырабатывает командное
значение скоростного угла крена, обеспечивающее
движение ОК по траектории, близкой к
"попадающей". Для того чтобы не допустить
больших ошибок по курсу, при заданном
рассогласовании по курсу выдаются команды на
смену знака командного значения угла крена, т. е.
команды на развороты по крену.
При достижении скорости, соответствующей М=12,
угол атаки постепенно уменьшается с 390 до 100 к концу участка спуска, что позволяет увеличить
аэродинамическое качество ОК. Начиная с М=10 для
обеспечения необходимой балансировки и
увеличения устойчивости движения раскрываются
створки воздушного тормоза, угол раскрытия
которых до скорости, соответствующей М не менее
0.8, изменяется по заданной программе.
При М=5 становится достаточно эффективным руль
направления, с помощью которого осуществляется
балансировка в боковом канале с переходом при
скорости, соответствующей М не более 3, в режим
управления. УД рыскания работают на спуске до
высоты 20 км - начала участка предпосадочного
маневрирования, к моменту которого выполняются ограничения на координаты, величину и
направление вектора скорости ОК: корабль должен
находиться в кольце на расстоянии Lк=(32 плюс-минус 13) км,
измеряемом по касательной к цилиндру
рассеивания энергии (ЦРЭ), иметь скорость (520 плюс-минус 60)
м/с, направление вектора которой должно
совпадать с касательной к ЦРЭ (восточному или
западному) с допустимой ошибкой не более 150 (см. схему предпосадочного маневрирования).
Восточный или западный ЦРЭ выбирается
в зависимости от направления ветра на ВПП так,
чтобы обеспечить полет ОК на заключительном
участке траектории в условиях встречного ветра.
 |
Схема предпосадочного маневрирования: 1 - западный ЦРЭ; |
Задачей предпосадочного маневрирования
является выведение ОК к началу траектории захода
на посадку в ключевую точку (КТ), расположенную на
высоте 4 км в вертикальной плоскости, проходящей
через ось ВПП, с ориентацией в ней (в плоскости)
вектора скорости. Параметры
движения ОК в КТ жестко ограничены по
координатам, скорости, углу наклона траектории и
отклонению от посадочного курса. Их реализация
достигается схемой движения, обеспечивающей
соответствие между располагаемой энергией ОК и
энергией, потребной для приведения его в КТ.
Энергия регулируется изменением длины
траектории и программного скоростного напора
(управление аэродинамическим качеством), а в дозвуковой области - еще и изменением угла
раскрытия воздушного тормоза. Управление
движением ОК осуществляется формированием в
начале участка предпосадочного маневрирования в
соответствии с текущим состоянием ОК
пространственной опорной траектории (и
последующим ее отслеживанием), которая может
перестраиваться в ходе полета, если
энергетическое состояние ОК не удовлетворяет
заданным требованиям.
"След" опорной траектории в горизонтальной
плоскости представляет собой систему
геометрических линий (см. схему
предпосадочного маневрирования): спираль
отворота - спираль доворота - касательная к
цилиндру выверки курса (ЦВК) - дуга окружности ЦВК
- финишная прямая, при этом спирали отворота и доворота соответствуют полету ОК с постоянным
углом крена =450, координаты КТ, центров ЦВК и
радиусы ЦВК постоянны, а спираль отворота
реализуется в случае избытка энергии.
В вертикальной плоскости на скоростях,
соответствующих М не менее 0.8, опорная траектория
формируется построением
программной зависимости высоты, соответствующей
номинальному скоростному напору, от оставшейся
дальности по "следу" траектории. На
режимах при М<0.8 реализуется управление
высотой полета относительно заданного
состояния в точке окончания предпосадочного
маневра (терминальное управление).
При дефиците располагаемой энергии для
увеличения протяженности полета ОК в качестве
опорной используется зависимость минимального
скоростного напора от высоты полета qmin(Н),
обеспечивающая максимальное качество, а при ее
избытке - зависимость максимального скоростного
напора от высоты полета qmax(Н), обеспечивающая
наибольшее рассеивание энергии.
Заключительной фазой участка спуска в атмосфере являются заход на посадку и собственно посадка ОК на ВПП с заданными параметрами движения. Заход на посадку и посадка определяются двумя особенностями ОК:
первая - отсутствие двигателей, обеспечивающих посадку по традиционной самолетной схеме, и
вторая - сравнительно малое аэродинамическое качество (Кmax=5,6) на этом участке полета.
В связи с этим для захода на посадку с последующей посадкой ОК на ВПП принята двухглиссадная схема, при которой вся траектория разбивается на четыре участка:
|
|
|
|
|
|
|
|
|
Приземление и пробег ОК происходят по сухой
и мокрой бетонной ВПП как в автоматическом, так и
в ручном режиме управления при посадочной
скорости Vпос=300...330 км/ч, угле тангажа u=10...130, при
попутном (до 5 м/с), встречном (до 20 м/с) и боковом
(до 15 м/с) ветре.
Управление пробегом до опускания передней
стойки шасси выполняется в канале тангажа
элевонами в режиме руля высоты, в путевом канале -
рулем направления, а после опускания носового
колеса - управляемой передней стойкой и
дифференциальным растормаживанием колес
основных стоек шасси.
 Алгоритмы управления
пробегом ОК сформированы так, что отказ одного из
управляющих органов не приводит к потере
управляемости и уводу с ВПП при различных
сочетаниях ветровых возмущений и отклонений от
оси ВПП. Большой объем статистического
моделирования, полеты на аналоге и
первый орбитальный полет ОК "Буран"
подтвердили эффективность управления на
пробеге, обеспечившего отклонение от оси ВПП в
конце пробега до 5 м в автоматическом и ручном
режимах.
Алгоритмы управления
пробегом ОК сформированы так, что отказ одного из
управляющих органов не приводит к потере
управляемости и уводу с ВПП при различных
сочетаниях ветровых возмущений и отклонений от
оси ВПП. Большой объем статистического
моделирования, полеты на аналоге и
первый орбитальный полет ОК "Буран"
подтвердили эффективность управления на
пробеге, обеспечившего отклонение от оси ВПП в
конце пробега до 5 м в автоматическом и ручном
режимах.
Торможение ОК осуществляется
трехкупольным тормозным парашютом
и тормозами колес основных стоек шасси, а также
воздушным тормозом, используемым в качестве
резервного при ручном управлении. Суммарный
пробег в зависимости от направления и
 силы ветра
и состояния поверхности ВПП не должен превышать
1800 м.
силы ветра
и состояния поверхности ВПП не должен превышать
1800 м.
Радиотехническая
система навигации, посадки и управления
воздушным движением орбитального корабля
"Вымпел" является основной в составе посадочного комплекса при выполнении
операции по приводу и автоматической посадке.
Подробное описание системы "ВЫМПЕЛ"
смотри в ЭКСПРЕСС-ОТЧЕТЕ
"О работе комплекса
радиотехнических систем навигации, посадки,
контроля траектории и управления воздушным
движением "ВЫМПЕЛ" для орбитального корабля
"Буран" 15 ноября 1988 г."
Слева и справа приведены схемы автоматической посадки ОК
"Буран" на ВПП полосу космодрома
Байконур 15 ноября 1988 года:
проекция орбиты на земную поверхность (слева), на
которой наглядно видна величина бокового
маневра; и справа - последние предпосадочные маневры в учетом сильного
бокового ветра. (ЗВУКОЗАПИСЬ
ПОСАДКИ)
Подробное описание фактической траектории
спуска и посадки ОК "Буран" 15.11.1988 можно найти в ЭКСПРЕСС-ОТЧЕТЕ
или на графиках.
| P.S.: |
Далеко не все поддерживали решение о проведении первых испытательных пусков "Бурана" в беспилотном, автоматическом режиме. За несколько месяцев до запуска в адрес Правительства было направлено коллективное письмо, подписанное в том числе летчиками-космонавтами А.А.Леоновым и И.П.Волком, о том, что "Буран" не сможет надежно выполнить полет в автоматическом режиме и что первый полет, как и у американцев на "Спейс Шаттле", должен быть пилотируемым. Но специальная комиссия, рассмотрев состояние подготовки ОК, согласилась с предложением технического руководства о первом беспилотном пуске. |
 |
 |
 |
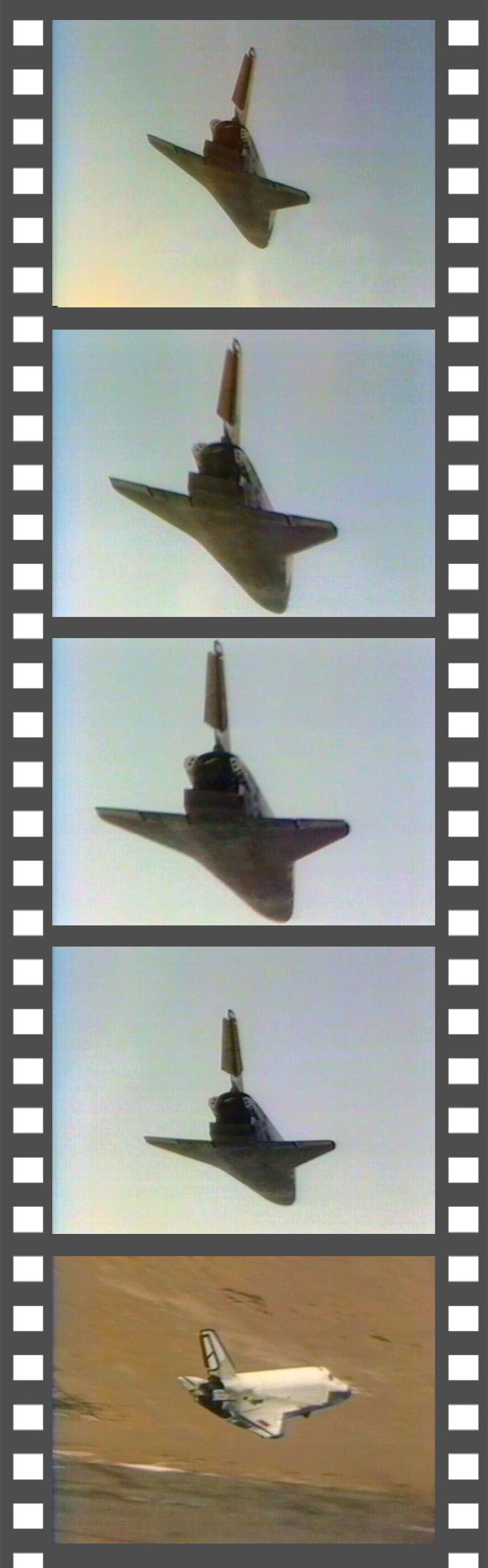
| Спуск "Бурана" в атмосфере на
высоте 10000 м, телесъемка с истребителя
сопровождения, пилотируемого М.Толбоевым
(хорошо виден расщепленный воздушный тормоз) preland.avi, 720x576, 4.68Mb, 42 сек. видео, (Внимание: очень большой размер!) |
Историческая
посадка "Бурана" на
посадочную полосу космодрома Байконур,
15 ноября 1988г., 09.23 ДМВ landing3.avi, 720x576, 3.37Mb, 36 сек. видео, (Внимание: очень большой размер!) |
Историческая
посадка "Бурана" на
посадочную полосу космодрома Байконур,
15 ноября 1988г., 09.23 ДМВ |
 |
 |
|
| Историческая
посадка "Бурана" на
посадочную полосу космодрома Байконур,
15 ноября 1988г., 09.23 ДМВ landing5.avi, 720x576, 3.12Mb, 33 сек. видео, (Внимание: очень большой размер!) |
Вид сзади вдоль
осевой линии ВПП на приземляющийся "Буран" , 15 ноября 1988г., 09.23.00 ДМВ;
хорошо виден расщепленный воздушный тормоз,
выхлопы работающей ВСУ и
"стекающие" с теплозащиты
"Бурана" потоки горячего воздуха. landing4.avi, 320x260, 1.85Mb, 34 сек. видео, (Внимание: очень большой файл!) |
Хотите
почувствовать себя командиром "Бурана"?
Видеозапись автоматической
посадки 15 ноября 1988г. видеокамерой,
установленной на линии взгляда командира
экипажа (правое рабочее место
РМ-1) |
Другие видеофрагменты полета и посадки "Бурана" можно увидеть в нашем фото/видео архиве
| Переход на: |







Web-master: ©Вадим Лукашевич 1998-2006
E-mail: buran@buran.ru