|
|
Траектории спуска и
посадки орбитального корабля "Буран".
Алгоритмы автоматического управления
Сложность создания алгоритмов автоматического управления движением заключалась в том, что в условиях эксплуатации орбитальный корабль должен иметь возможность из произвольной точки области допустимых начальных условий входа в атмосферу на высоте 100 км (см. рисунок) за время немногим более 30 минут совершить посадку на заданный аэродром, расположенный на расстоянии более 8000 км, погасив при этом скорость полета с 28000 км/ч до нуля. Полет и торможение ОК в атмосфере производятся при наличии жестких ограничений кинематических параметров движения, связанных с допустимым нагревом конструкции, допустимыми значениями перегрузок и скоростного напора, запасом топлива для работы двигателей реактивной системы управления (РСУ) и рулевых систем аэродинамических органов управления, а также требованием выполнения успешной посадки при наличии любых двух отказов в аппаратуре систем спуска и посадки.
Все это
рассматривалось при действии широкого
расчетного набора возмущений:
- разбросов начальных условий входа в
атмосферу;
- отклонений термодинамических
параметров атмосферы (плотность, давление,
температура) от стандартных значений;
- струйного ветра, порывов ветра и
атмосферной турбулентности;
- погрешностей измерительных и
информационных средств;
- погрешностей определения
аэродинамических характеристик ОК;
- погрешностей определения центровочных
и инерционно-массовых характеристик ОК.
Эти возмущения носят в основном случайный характер, изменяясь не только от полета к полету, но и в течение одного полета. В таких условиях невозможно определить фиксированную расчетную траекторию спуска ОК в атмосфере и его посадки на взлетно-посадочную полосу (ВПП). Можно рассматривать только расчетную трубку траекторий, в которой с определенной вероятностью должна находиться фактическая траектория. Расчетные трубки траекторий для ОК "Буран" определялись для вероятности Р=0,997.
Задача приведения ОК "Буран" из
области допустимых начальных условий на высоте
100 км до посадки на ВПП была решена путем
разделения полного движения ОК на три
функционально различных участка полета:
- участок спуска Н=100...20 км;
- участок предпосадочного маневрирования
Н=20...4 км;
- участок захода на посадку и посадки Н=4...0
км.
Алгоритмы автоматического управления движением каждого участка, решая свои специфические задачи, последовательно приводили ОК "Буран" из одной области параметров движения в другую, существенно более узкую. Конечная область параметров движения на участке захода на посадку соответствовала условиям успешной посадки ОК на ВПП.
На каждом участке полета конечные области параметров движения ОК "Буран" принимались едиными для всех вариантов и условий эксплуатации, в том числе и при наличии двух отказов в системе управления. Выбор расчетных вариантов производился таким образом, чтобы для приведения в эти области обеспечивался определенный запас по маневренности, устойчивости и управляемости ОК.
Область допустимых начальных условий входа в атмосферу
|
Область допустимых
начальных условий входа в атмосферу (ОДНУ) при
первом полете ОК "Буран": |
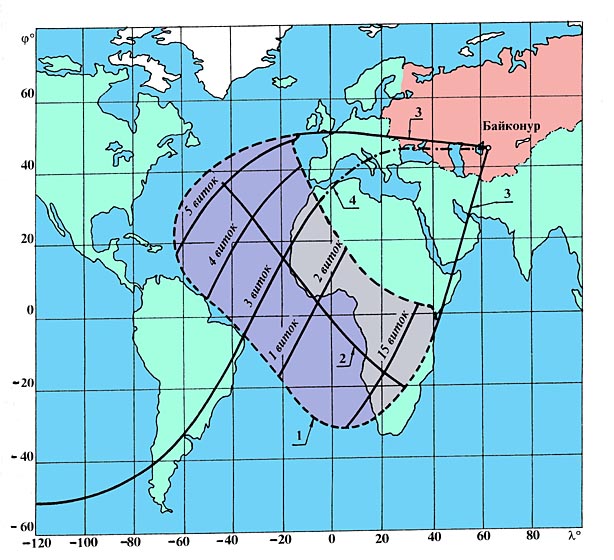
Область допустимых начальных условий входа ОК "Буран" в атмосферу (ОДНУ) включает в себя совокупность географических координат (широта и долгота), при которых обеспечивается при действии расчетньк возмущений приведение ОК "Буран" в заданную область параметров в районе аэродрома с допустимыми отклонениями и удовлетворяются при этом все ограничения, налагаемые на параметры движения ОК и управляющие параметры.
В интересах безопасности орбитального полета область допустимых начальных условий входа в атмосферу должна охватывать как можно большее число суточных витков, что могло быть достигнуто при максимальном использовании аэродинамического качества ОК "Буран" при совершении боковых маневров с посадочных витков, проходящих через края ОДНУ.
На рисунке приведена ОДНУ и расчетная область возможных траекторий движения орбитального корабля "Буран" при полете в атмосфере и штатной посадке на аэродром посадочного комплекса Байконура при наклонении орбиты i=51,640. Границей атмосферы условно принята высота 100 км.
В приведенной ОДНУ показаны траектории посадочных витков первых суток полета и расчетная (прицельная) линия приведения ОК "Буран" на высоту Н=100 км после выдачи тормозного импульса, дальность от которой до расчетной области приведения на Н=20 км составляет Lном=8250 км. Прицельная линия проходит практически через середину ОДНУ и имеет приблизительно одинаковые запасы по расчетной продольной дальности на возможное ее увеличение или уменьшение при полете до высоты 20 км под действием попутных или встречных возмущений. Конечные точки прицельной линии соответствуют максимальным боковым дальностям спуска, реализуемым при расчетных возмущениях.
На этом же рисунке приведена траектория первого полета ОК "Буран", посадочным витком которого был третий, с боковой дальностью до аэродрома посадки Lбок=570 км. Вход в атмосферу на высоте Н=100 км в первом полете произошел при следующих условиях:
| • | скорость полета 27330 км/ч; |
| • | угол наклона траектории -0,910; |
| • | географическая широта точки входа 14,90; |
| • | географическая долгота точки входа 340,50; |
| • | дальность до ВПП 8270 км. |
Участок спуска Н=100...20 км
На участке спуска Н=100...20 км основная задача системы управления движением ОК "Буран" заключалась в том, чтобы сформировать и реализовать такую траекторию движения ОК, которая удовлетворяла бы всем ограничениям, накладываемым на параметры движения из-за аэродинамического нагрева, допустимых значений перегрузок и скоростного напора, запаса топлива для работы рулевых систем и РСУ, и обеспечила бы приведение ОК на высоту 20 км в заданную область конечных параметров движения в районе аэродрома посадки, которая задана следующим образом:
| • | вектор скорости направлен по касательной к цилиндру рассеивания энергии (ЦРЭ) с допустимым отклонением по углу курса от касательной к ЦРЭ в пределах не более 150; |
| • | модуль вектора скорости составляет V=520 плюс/минус 60 м/с; |
| • | расстояние по дуге ортодромии от центра масс ОК до точки касания ЦРЭ составляет Lк=32 плюс/минус 13км. |
Существуют два основных метода формирования закона управления траекторией спуска ОК, обеспечивающие его приведение в заданную область с требуемым уровнем точности:
| • | управление по текущему состоянию, направленное на устранение текущего рассогласования между параметрами фактической и заданной заранее опорной траектории; |
| • | управление конечным состоянием, направленное на устранение ошибок приведения в заданную конечную область (терминальное управление). |
Для ОК "Буран" был выбран метод управления конечным состоянием с использованием прогноза по приближенным формулам (аналитический прогноз). В качестве управляющих параметров на траектории спуска используются проекции аэродинамической нормальной силы в продольной и боковой плоскостях, задаваемые углами атаки а и скоростного крена у. Выбранный метод аналитического прогноза конечного состояния не требует большой загрузки БЦВМ и обладает определенной гибкостью в построении траекторий, обеспечивая в то же время заданный уровень точности конечных параметров.
В качестве регулируемых параметров системы наведения принимались:
| • | дальность L, отсчитываемая по большому кругу, касающемуся ЦРЭ, от проекции текущего положения ОК на поверхность земли до точки касания; |
| • | промах по направлению, равный углу между вектором путевой скорости ОК и направлением по большому кругу, касающемуся ЦРЭ. |
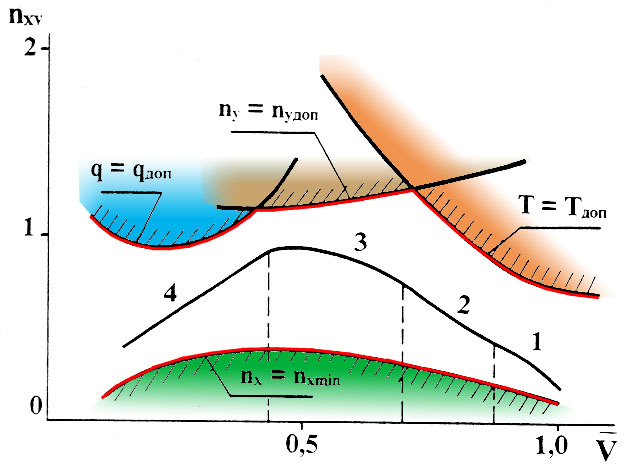
Профиль траектории ОК "Буран" на участке спуска формировался заданной функцией продольной перегрузки nxv от относительной скорости полета V, где nxv - проекция вектора суммарной перегрузки ОК на вектор относительной скорости.
Выбор продольной перегрузки nxv в качестве параметра формирования профиля траектории оказался очень удачным, так как на плоскости nxv(V) легко отображаются указанные выше ограничения на траекторию движения, и в то же время, интегрируя функцию nxv(V), заданную полиномами, можно получить прогноз конечной дальности в виде аналитических формул в любой точке участка спуска. Формирование командной зависимости nxv(V) сводится к периодическому уточнению коэффициентов аппроксимирующих полиномов из условия равенства прогнозируемой и требуемой дальностей полета до точки прицеливания.
|
Профиль изменения
продольной перегрузки на участке спуска ОК: |
На рисунке слева
приведен общий вид командной зависимости для
продольной перегрузки nxv(V*),
принятой для ОК "Буран", где V*=V/Vкр
- безразмерная относительная скорость, Vкр -
круговая скорость. Здесь же
показаны также ограничения по температуре
аэродинамического нагрева (Т=Тдоп),
скоростному напору (q=qдоп), связанной
нормальной перегрузке (ny=nyдоп) и
граница физически возможной области
квазистационарного планирования с нулевым углом
крена (nxv=nxmin).
Функция nxv(V*) была разбита на
четыре участка, каждый из которых описывался
своим полиномом. Имея навигационное значение
дальности до точки прицеливания и вычисляя
прогнозируемую дальность полета, можно
определить по невязкам требуемый
"попадающий" профиль изменения продольной
перегрузки nxv(V*). Полученная
командная зависимость перегрузки от скорости
отслеживается в течение такта управления за счет
выдерживания определенного уровня эффективного
аэродинамического качества Кэ=Кcosу, что
достигается путем изменения модуля угла
скоростного крена. Знак угла скоростного крена
выбирается из условия компенсации промаха в
боковом направлении.
|
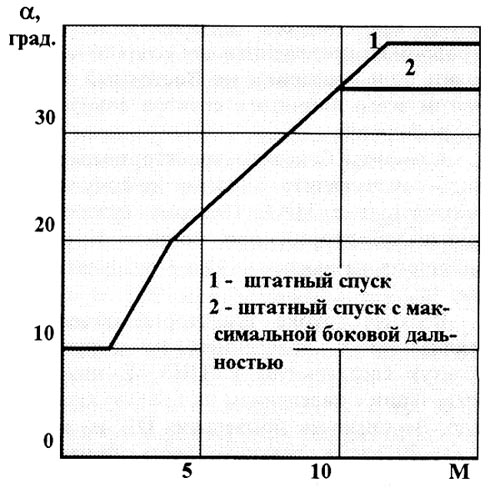
Программный угол атаки
ОК "Буран": |
Коэффициенты командной функции перегрузки nxv(V*) зависят от программы изменения угла атаки по числу Маха а=а(М), при выборе которой учитывались противоречивые требования, связанные с возможностью реализации максимального бокового маневра, конструктивными тепловыми ограничениями и необходимостью плавного сопряжения участка спуска с участком предпосадочного маневрирования.
При М>10 условия аэродинамического нагрева ограничивают располагаемые утлы атаки ОК "Буран" диапазоном 300...410.
Для реализации максимального бокового маневра угол атаки должен быть приближен к углу, обеспечивающему максимальное аэродинамическое качество аКmax=18...200.
Переход с участка спуска на участок предпосадочного маневрирования должен осуществляться при заданном векторе скорости без перебалансировок по углу атаки.
В итоге была выбрана программа угла атаки, приведенная на рисунке справа. В конце участка спуска для выполнения заданных точностных характеристик по вектору скорости ОК допускалось управление углом атаки относительно программных значений в пределах ±3°.
|
Расчетная трубка
траекторий первого полета ОК "Буран" с
сечениями по высоте на участке спуска при
подходе к району аэродрома посадки: |
|
Области
приведения ОК "Буран" на высоте Н=20 км и
расчетные трубки траекторий движения на участке
ПМ в первом полете при выходе в "ключевую
точку" К (Н=4 км): |
На рисунке слева приведена расчетная трубка траекторий движения ОК "Буран" на участке спуска при подходе к району заданного аэродрома, определенная для условий первого полета при наведении на Восточный ЦРЭ с учетом всего принятого спектра возмущений и ограничений.
Алгоритм бокового траекторного управления осуществляет наведение на одну из двух касательных к ЦРЭ. Поэтому сужающаяся трубка траекторий при подлете к району аэродрома на высоте около 35 км разделяется на две.
Верхняя трубка траекторий объединяет реализации с наведением на левую (по полету) касательную к ЦРЭ, а нижняя - реализации с наведением на правую касательную. Вероятность приведения ОК на высоте Н=20 км в левую область приведения составляла Р=0.3, а в правую область - Р=0,7.
На этом же рисунке показана фактическая траектория первого полета ОК "Буран" (красным цветом, красные точки показывают прохождение различных высот) , наведение в котором производилось на правую касательную Восточного ЦРЭ.
Расчетные области приведения к началу участка предпосадочного маневрирования при Н=20 км для первого полета "Бурана" представлены слева, где рассмотрено наведение ОК на Западный и Восточный ЦРЭ. Задание ЦРЭ для наведения производится перед выдачей тормозного импульса в зависимости от ветра на полосе, так как посадка на ВПП должна производиться против ветра. Указанные на левом рисунке области приведения относятся только к условиям первого полета. При изменении высоты, посадочного витка или наклонения орбиты, а также при нештатных посадках области приведения будут другими, в совокупности образуя кольца вокруг Западного и Восточного ЦРЭ.
Участок предпосадочного маневрирования Н=20...4км
Основная задача алгоритмов управления движением на участке предпосадочного маневрирования (ПМ) - приведение ОК из конечной области параметров движения участка спуска на высоте Н=20 км в зону устойчивой работы радиосредств посадки в окрестности так называемой "ключевой точки", расположенной на высоте Н=4 км над продольной осью ВПП на расстоянии примерно 14,5 км от центра ВПП, с одновременным рассеиванием избыточной энергии.
Задача рассеивания
избыточной энергии в общем случае может быть
решена тремя методами:
- путем изменения
протяженности траектории с помощью разворотов
для согласования текущей энергии летательного
аппарата с дальностью полета до расчетной точки;
- путем изменения
скоростного напора;
- путем изменения
аэродинамического качества.
Для ОК "Буран" был выбран комбинированный метод, в основу которого было положено изменение протяженности траектории в сочетании с программным изменением аэродинамического качества и допустимого скоростного напора. При этом методе производилось изменение длины траектории путем спиралеобразных разворотов с одновременным отслеживанием программных предельных значений скоростного напора в функции высоты полета и программных углов отклонения воздушного тормоза в функции от числа Маха (до М=0,8).
Максимальный программный скоростной напор должен реализовываться при действии попутного ветра для ускоренного рассеивания энергии, а минимальный программный скоростной напор характерен для полета на максимальном качестве при встречном ветре.
В начале участка предпосадочного маневрирования в соответствии с уровнем механической энергии ОК и вектором состояния система управления движением формирует пространственную опорную траекторию, соединяющую начальное положение ОК на высоте Н=20 км с "ключевой точкой".
Проекция опорной траектории на горизонтальную плоскость в общем случае состоит из пяти участков: спираль отворота, спираль доворота, касательная к цилиндру выверки курса (ЦВК), дуга окружности ЦВК, финишная прямая к "ключевой точке".
При формировании опорной траектории для номинальной программной зависимости скоростного напора путем сопряжения элементов "спираль", "прямая", "дуга окружности" определяются четыре возможных варианта траекторий в горизонтальной плоскости без отворота.
Для каждой траектории определяется программная зависимость высоты полета ОК от оставшейся дальности до "ключевой точки". Выбор опорной траектории из четырех возможных осуществляется по результатам последовательного сравнения требуемого и располагаемого значений энергии ОК. В качестве опорной принимается траектория, у которой рассогласование по энергии не превышает допустимой величины.
Отворот реализуется, если наилучшая траектория без отворота имеет недостаточную протяженность для текущего энергетического состояния ОК или в случае недопустимо большого засечения окружности ЦВК спиралью.
В процессе полета ведется контроль энергетического состояния ОК, и при неблагоприятных условиях (текущее боковое отклонение от опорной траектории превышает допустимую величину), а также в точках разворотов по крену (конец спирали отворота, конец спирали доворота) опорная траектория переопределяется.
При формировании опорной траектории учитываются ограничения по шарнирным моментам органов управления, скоростному напору, допустимым значениям углов атаки, крена и связанных перегрузок, а также требования минимальной перебалансировки при переходе через трансзвуковую область.
Алгоритмы управления движением
приводят орбитальный корабль в район
"ключевой точки" (Н=4 км) путем отслеживания
сформированной пространственной опорной
траектории (при М>0,8) и комбинацией отслеживания
"следа" опорной траектории в горизонтальной
плоскости с терминальным наведением в
"ключевую точку" в вертикальной плоскости
(при М<0,8). При этом параметры полета в
"ключевой точке" должны находиться внутри
следующих диапазонов:
- по высоте
4000 плюс/минус 500м;
- по боковому отклонению
< 500м;
- по скорости
170 плюс/минус 20 м/с;
- по углу наклона траектории
-17
плюс/минус 60 ;
- по углу курса
< 100.
На рисунке (смотри выше) показаны расчетные трубки траекторий движения ОК "Буран" на участке предпосадочного маневрирования, определенные для условий первого полета. Там же приведена траектория движения ОК "Буран" в первом полете.
Схема предпосадочного
маневрирования: |
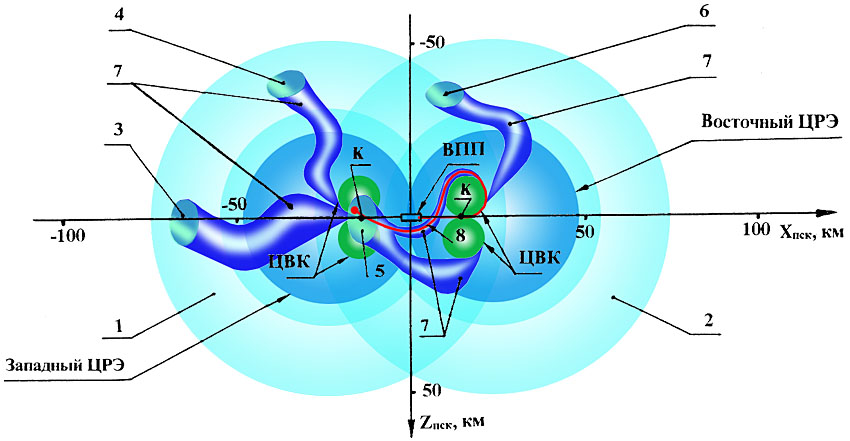
Расчетная
трубка траекторий 1-го полета "Бурана" на
участке захода на посадку и посадки (показана вся ВПП, включая грунтовую
полосу безопасности - по 259 м с каждого торца):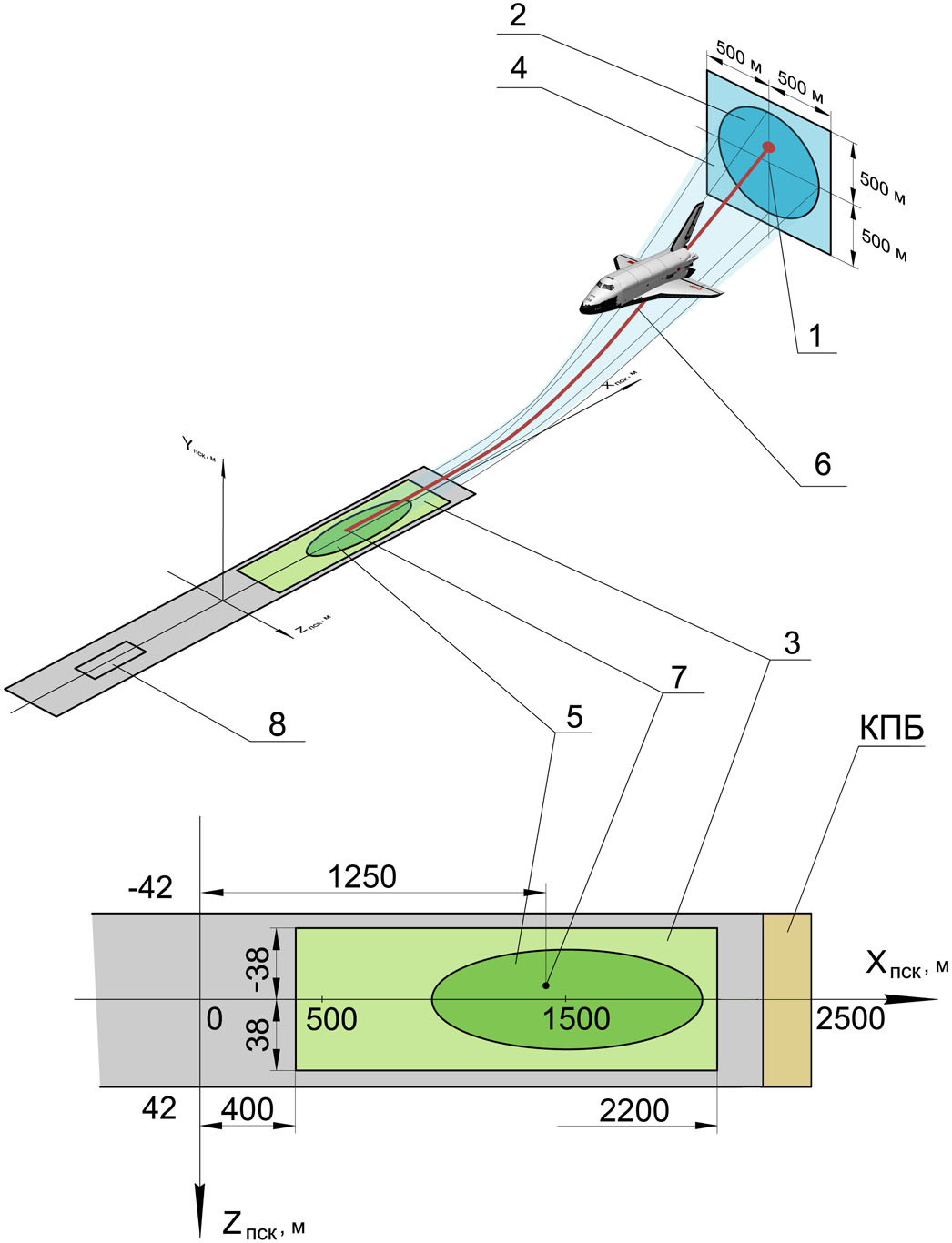 1 - "ключевая точка" Н=4км; 2 - расчетная область приведения на Н=4 км; 3 - заданная область касания ВПП; 4 - заданная область начальных условий; 5 - расчетная область касания ВПП в 1-м полете; 6 - траектория движения "Бурана" в 1-м полете; 7- точка касания ВПП в 1-м полете; 8 - область остановки ОК на ВПП; КПБ - грунтовая концевая полоса безопасности длиной 50 метров. |
Как уже указывалось, в первом полете "Бурана" выполнялось наведение на правую касательную Восточного ЦРЭ с областью приведения 5 на высоте Н=20 км (смотри рисунки выше). Статистические расчеты показали, что существуют две трубки возможных траекторий приведения ОК из этой области в "ключевую точку" (см. рисунок). Одна трубка идет в обход Южного ЦВК, а другая - в обход Северного ЦВК. Вероятность попадания ОК в южную трубку оценивалась величиной Р=0,97, а в северную Р=0,03. Тем не менее, в первом полете на высоте Н=20 км создались условия формирования опорной траектории вокруг северного ЦВК. По этой траектории и выполнялся первый полет ОК "Буран" (наземные операторы не ожидали этого и в залах объединенного командно-диспетчерского пункта (ОКДП) возникла "легкая паника").
Расчетная область приведения ОК "Буран" в "ключевую точку" в условиях первого полета и его фактическое положение в этой области показаны на рисунке ниже, а реальная траектория захода в "ключевую точку" показана справа.
Участок захода на посадку и посадки Н=4...0 км
Основная задача участка захода на посадку и посадки (ЗП) - точный разворот вектора скорости ОК на посадочный курс и приведение его по опорной траектории на ВПП в заданную точку касания с точностью, гарантирующей безопасность и комфортность приземления.
Управление движением ОК на участке ЗП сводится к отслеживанию заданной опорной траектории и стабилизации программных зависимостей приборной скорости.
Небольшое аэродинамическое качество и ограниченные энергетические возможности регулирования скорости полета предопределили использование двухглиссадной схемы захода на посадку с участком сопряжения между ними.
Значение угла наклона крутой глиссады выбирается в зависимости от массы ОК в диапазоне = -17...-230 из условия равновесного планирования с постоянной приборной скоростью Vприб=520 км/ч при среднем по эффективности угле раскрытия воздушного тормоза 550. На этом участке отрабатываются ошибки приведения ОК в "ключевую точку".
С высоты 400 м производится выравнивание ОК с крутой глиссады на пологую с углом наклона траектории = -20.
Участок программного сопряжения крутой и пологой
глиссад с углом наклона = -100 предназначен для снижения максимума
нормальной перегрузки ny, возникащего при первом выравнивании.
Полет на участке первого выравнивания и по пологой глиссаде выполняется с
программным уменьшением приборной скорости в зависимости от оставшейся
дальности.
Продолжительность пологой глиссады должна быть
достаточной для стабилизации параметров полета перед заключительным
выравниванием и приземлением.
Заключительное выравнивание начинается после
прохождения переднего обреза ВПП на высоте Н=20 м. На этом участке в
зависимости от условий приведения на Н=20 м и действующих ветровых
возмущений формируется экспоненциальная траектория с монотонно возрастающим
углом тангажа ОК, которая обеспечивает выполнение заданных точностных
требований в момент касания ВПП.
Параметры движения в заданной
точке касания должны находиться в следующих
диапазонах:
- продольная дальность от центра ВПП в
посадочной системе координат Xпск= -2200...-400 м
при номинальном значении -1500м;
- боковое отклонение от оси ВПП Zпск
не более 38 м;
- путевая скорость касания Vпут
не более 360 км/ч;
- вертикальная скорость касания Vy
не более 3м/с.
На рисунке справа приведена расчетная
трубка траекторий движения ОК "Буран" на
участке захода на посадку и посадки и расчетная
область касания ВПП, определенные для условий
первого полета, и показана схематично
фактическая траектория первого полета ОК
"Буран". Несмотря на сильный
встречно-боковой порывистый ветер со скоростью W=15...18 м/с (что превышает предельно-допустимые
нормы для посадки "Space Shuttle"),
условия касания были практически идеальными - согласно
официальным данным, точностные параметры точки касания были следующими:
- продольная дальность
Xпск= -1515 м (промах 15 м);
- боковое отклонение от оси ВПП
Zпск=5,8 м;
- путевая скорость касания
Vпут=263 км/ч;
- вертикальная скорость касания
Vy = -0,3 м/с.
|
|
именно эти данные были приведены через 10 дней после посадки
в ЭКСПРЕСС-ОТЧЕТЕ "О работе комплекса
радиотехнических систем навигации, посадки,
контроля траектории и управления воздушным
движением "ВЫМПЕЛ" для орбитального корабля
"Буран" УРКТС "Энергия" 15 ноября 1988 г."
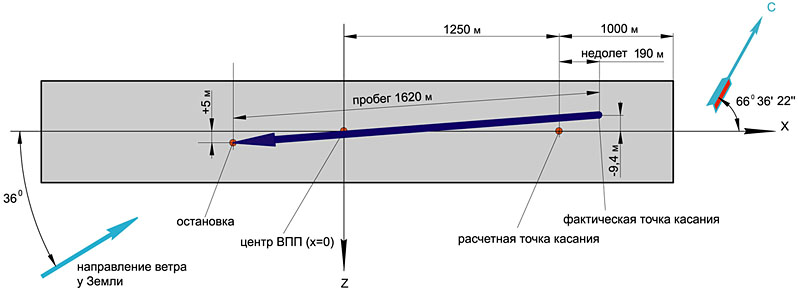
Но проведенный
web-мастером анализ показывает, что на самом деле
точностные параметры точки касания "Бурана" и последующего пробега по ВПП были
другие: недолет (промах) по продольной дальности составил около 190 м, боковое
отклонение вправо (по направлению движения) от оси ВПП -9.4 м (см. рисунок
слева).
Причина ошибки, скорее всего, заключалась в том, что "Буран" действительно
коснулся посадочной полосы рядом с расчетной точкой касания, но ... не своей, а
чужой! Все дело в том, что на ВПП также была нанесена стандартная аэродромная
разметка в виде двух белых продольных полос, обозначающих место точного
приземления для самолетов. Вот именно рядом с этими полосами, перелетев их на
два-три десятка метров, и приземлился "Буран", не долетев почти две сотни метров
до своей отметки - белого ромба. Это подтверждается видеокадрами посадки,
смонтированными воедино:

 Заметим, что точных данных о положении точки
касания нет. Получить их можно было сразу же после посадки, измерив тормозной
след покрышек корабля на бетонке, однако этого никто не сделал. А анализ кино-фото-видеодокументов опровергает официальные данные. Действительно,
расчетная точка касания "Бурана" обозначалась большим белым ромбом на бетонке,
центр которого располагался в 1000 метрах от начала (торца) ВПП. Видеосъемка
касания и первых секунд пробега по ВПП, представленная на иллюстрации,
неопровержимо свидетельствует о существенном недолете порядка 180-200 метров.
Заметим, что точных данных о положении точки
касания нет. Получить их можно было сразу же после посадки, измерив тормозной
след покрышек корабля на бетонке, однако этого никто не сделал. А анализ кино-фото-видеодокументов опровергает официальные данные. Действительно,
расчетная точка касания "Бурана" обозначалась большим белым ромбом на бетонке,
центр которого располагался в 1000 метрах от начала (торца) ВПП. Видеосъемка
касания и первых секунд пробега по ВПП, представленная на иллюстрации,
неопровержимо свидетельствует о существенном недолете порядка 180-200 метров.
Добавим, что и боковое отклонение от оси ВПП после остановки
орбитального корабля составило около 5 м вместо официально объявленных 80 см,
что хорошо видно на фотографии "Бурана", сделанной Сергеем Грачевым через
полчаса после посадки. На фото (см.слева), запечатлевшем "Буран" сзади,
отчетливо видна белая осевая линия ВПП и смещенное влево (в направлении Z
в посадочной системе координат) положение корабля после посадки.
 Подробное описание фактической траектории
движения ОК "Буран" 15.11.1988 по данным траекторных измерений системы "ВЫМПЕЛ"
смотри на графиках справа и в ЭКСПРЕСС-ОТЧЕТЕ "О работе комплекса
радиотехнических систем навигации, посадки,
контроля траектории и управления воздушным
движением "ВЫМПЕЛ" для орбитального корабля
"Буран" УРКТС "Энергия" 15 ноября 1988 г."
Подробное описание фактической траектории
движения ОК "Буран" 15.11.1988 по данным траекторных измерений системы "ВЫМПЕЛ"
смотри на графиках справа и в ЭКСПРЕСС-ОТЧЕТЕ "О работе комплекса
радиотехнических систем навигации, посадки,
контроля траектории и управления воздушным
движением "ВЫМПЕЛ" для орбитального корабля
"Буран" УРКТС "Энергия" 15 ноября 1988 г."
На графиках
справа, выполненных на графопостроителе в день полета "Бурана" 15 ноября
1988 года, условно обозначены:
X - продольная ось пространственной опорной системы
координат, совпадающая с продольной осью ВПП, в метрах;
H - высота
в метрах;
Z - отклонение от оси ВПП в метрах (боковая координата,
перпендикулярная оси X);
M
- числа Маха;
VY - вертикальная скорость снижения (вертикальная
составляющая скорости , вдоль оси H) в м/с;
GAM - угол крена в скоростной
(предположительно)
системе координат;
BT - предположительно, угол раскрытия
воздушного тормоза в градусах;
VPR - ?
Особенности выбора системы стабилизации
При разработке системы стабилизации очень важной была задача выбора сравнительно небольшого числа расчетных случаев, на базе которых можно вести основной объем исследований и расчетов.
В основу базовых расчетных случаев были положены несколько наихудших по устойчивости и управляемости сочетаний разбросов значений аэродинамических характеристик ОК из-за возможных погрешностей их определения:
| • | минимальная устойчивость ОК и минимальная эффективность управляющих органов; |
| • | минимальная устойчивость ОК и максимальная эффективность управляющих органов; |
| • | наихудшая управляемость по элевонам в режиме элеронов; |
| • | наихудшая балансируемость элевонами; |
| • | наихудшая управляемость элевонами и рулем направления; |
| • | другие расчетные случаи. |
В каждом из этих случаев дополнительно учитывались возможные отказы и максимальные по модулю отклонения следующих характеристик:
| • | неблагоприятные разбросы значений продольной и поперечной центровок и моментов инерции из-за возможных погрешностей их определения; |
| • | неблагоприятные по знаку разбросы аэродинамических шарнирных моментов; |
| • | неблагоприятные сочетания разбросов характеристик интерференции струй РСУ; |
| • | наихудшие (наилучшие) параметры рулевых систем и РСУ (в границах допусков); |
| • | расчетные порывы ветра неблагоприятного знака, возникающие в наиболее неблагоприятные моменты времени; |
| • | неблагоприятные по знаку ошибки измерения угла атаки и угла скольжения; |
| • | два отказа в гидросистеме рулевых приводов или двигателей РСУ. |
Многопараметричность, нелинейность и достаточно большая неопределенность аэродинамических характеристик ОК в сочетании с многообразием траекторий полета и широким диапазоном изменения угла атаки привели к появлению участков полета, на которых тот или иной знак реакции ОК на отклонение управляющих органов или даже потеря управляемости могли наступить или не наступить только в зависимости от сочетания разбросов погрешностей аэродинамических характеристик ОК. Это обстоятельство в большой мере обусловило сложность задачи синтеза алгоритмов стабилизации. Все известные методы синтеза (частотных характеристик, корневого годографа, фазовой плоскости и т.д.) были пригодны для решения лишь отдельных узких вопросов, но не позволяли решать задачу в целом. Поэтому основным методом стал метод построения областей устойчивости и качества (ОУК).
Метод ОУК основан на численном интегрировании замкнутой системы уравнений, включающей линеаризованную модель объекта с "замороженными" коэффициентами и полные нелинейные модели алгоритмов управления и исполнительных органов.
Во всех случаях анализируются переходные процессы в системе, вызванные либо командами управления, либо порывом ветра.
Условием попадания контролируемых параметров системы стабилизации внутрь допустимой области (удовлетворительный процесс) служит выполнение ряда критериев, различных в каждом конкретном случае. При этом нахождение исследуемой точки внутри полученной ОУК гарантирует не только устойчивость, но и требуемое качество переходного процесса.
Сложность данного метода заключается в большом числе расчетных случаев, что вызывает необходимость определения обобщенной области - пересечения всех отдельных областей. В тех случаях, когда такого пересечения не существовало, система стабилизации модифицировалась.
Окончательная отработка алгоритмов системы стабилизации проводилась при исследовании динамики полета с помощью большого моделирующего комплекса, содержащего полную модель ОК "Буран" и его управляющих органов, модель атмосферных возмущений и полные модели систем навигации, наведения и стабилизации. Надо отметить, что выбранные методом ОУК структура и настройки системы стабилизации практически не потребовали корректировки по результатам полного моделирования.
Full English version: "Trajectories of BURAN Orbiter's Descent and Landing Algorithms of the Automatic Guidance and Control" by Dr. Kirpisсhikov V.P.
 |
 |
 |
| Спуск "Бурана" в атмосфере на
высоте 10000 м, телесъемка с истребителя
сопровождения, пилотируемого М.Толбоевым
(хорошо виден расщепленный воздушный тормоз) preland.avi, 720x576, 4.68Mb, 42 сек. видео, (Внимание: очень большой размер!) |
Историческая
посадка "Бурана" на
посадочную полосу космодрома Байконур,
15 ноября 1988г., 09.23 ДМВ landing3.avi, 720x576, 3.37Mb, 36 сек. видео, (Внимание: очень большой размер!) |
Историческая
посадка "Бурана" на
посадочную полосу космодрома Байконур,
15 ноября 1988г., 09.23 ДМВ |
 |
 |
|
| Историческая
посадка "Бурана" на
посадочную полосу космодрома Байконур,
15 ноября 1988г., 09.23 ДМВ landing5.avi, 720x576, 3.12Mb, 33 сек. видео, (Внимание: очень большой размер!) |
Вид сзади вдоль
осевой линии ВПП на приземляющийся "Буран" , 15 ноября 1988г., 09.23.00 ДМВ;
хорошо виден расщепленный воздушный тормоз,
выхлопы работающей ВСУ и
"стекающие" с теплозащиты
"Бурана" потоки горячего воздуха. landing4.avi, 320x260, 1.85Mb, 34 сек. видео, (Внимание: очень большой файл!) |
Хотите
почувствовать себя командиром "Бурана"?
Видеозапись автоматической
посадки 15 ноября 1988г. видеокамерой,
установленной на линии взгляда командира
экипажа (правое рабочее место
РМ-1) |
Другие видеофрагменты полета и посадки "Бурана" можно увидеть в нашем фото/видео архиве
P.S.: на странице использованы
материалы статьи В.П.Кирпищикова
(стр.46-55) из книги
"Авиационно-космические системы",
(сборник статей под ред. Г.Е.Лозино-Лозинского
и А.Г.Братухина, М.:Изд-во МАИ, тираж 3000 экз., 1997, 416
стр., ил.);
фотографии из архива Сергея Грачева
и схемы, выполненные Андреем Юргенсоном
| Переход на: |






Web-master: ©Вадим Лукашевич 1998-2009
E-mail: buran@buran.ru


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}