Динамика старта
Движение ракеты при
старте называем начальным участком движения,
понимая под этим пролет ракеты вблизи элементов
и сооружений стартового комплекса от момента
трогания до выхода за пределы стартового
комплекса, то есть до поднятия на высоту наиболее
высокого сооружения стартового комплекса.
Основная задача, которая ставится
перед управлением движением ракеты на начальном
участке, это - обеспечение условий несоударения
ракеты с наземными сооружениями и элементами
стартово-стыковочного блока, служащего опорой
ракеты на стартовом комплексе.
Наземными сооружениями,
существенными с точки зрения обеспечения
безударного движения, являются
заправочно-дренажная мачта, агрегат экстренной
эвакуации и молниеприемники, которые и
представляют собой наиболее высокие сооружения
стартового комплекса. Другие сооружения не
являются важными в указанном смысле и при
исследовании движения на начальном участке не
учитываются.
Из элементов стартово-стыковочного
блока (блока Я) наиболее существенным является
колонна пневмогидросвязи.
Движение на начальном участке
можно, в свою очередь, дополнительно разбить на
ряд этапов.
В качестве первого этапа можно
рассматривать движение ракеты непосредственно
после появления тяги двигателей и до отрыва всех
блоков первой ступени от стартово-стыковочного
блока. Этот этап определяется характером выхода
на режим двигателей и упругими свойствами ракеты
и стыковочного блока. Если считать ракету
симметричной, а стыковочный блок и ракету
абсолютно жесткими конструкциями, то этот этап
при отсутствии внешних возмущений вообще не
существует. Отрыв ракеты происходит мгновенно
при достижении суммарной тягой значения, равного
стартовой массе ракеты.
Второй этап - движение ракеты,
сопровождающееся скольжением хвостового
шпангоута по направляющим шпилькам, которые
расположены на стартово-стыковочном блоке.
Следующий этап - движение, при котором камеры маршевых
двигателей первой и второй ступеней выходят из стыковочного блока, точнее из
"колодцев", в которых располагаются камеры. Этот этап характерен тем, что
между камерами и стенками указанных колодцев имеется сравнительно малый
зазор (в номинале 300 мм), причем при движении ракеты он уменьшается за счет
вращения ракеты относительно центра масс, что обусловлено его несимметрией, и при
определенных условиях без принятия специальных
мер может произойти соударение. Для исключения
этого недопустимого явления на определенном
этапе разработки была введена так называемая
система сопровождения. Эта система представляла
собой гидромеханическое устройство, связывающее
стартово-стыковочный блок и хвостовые отсеки
блоков первой ступени таким образом, что во время
движения ракеты на этапе выхода камер двигателей
из блока на ракету (в местах крепления системы
сопровождения) действовали силы, препятствующие
соударению камер сгорания двигателей со
стартовым блоком. После подъема ракеты и выхода
камер из колодцев узлы связи системы
сопровождения автоматически отсоединяются от
ракеты.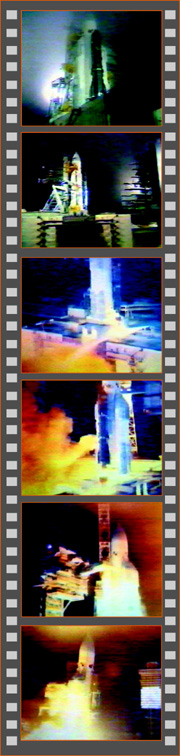
В дальнейшем система сопровождения
была исключена ввиду того, что был принят способ
обеспечения безударности движения на
рассматриваемом этапе, основанный на
использовании управляющих органов.
И наконец последний, в определенном
смысле самый сложный и ответственный этап, -
свободное движение ракеты, которым необходимо
управлять с помощью автомата стабилизации и
органов управления. Сложность этого этапа
заключается в том, что движение ракеты
происходит в непосредственной близости от
элементов стартового блока пневмогидросвязи и
агрегатов наземных сооружений,
заправочно-дренажной мачты, агрегата экстренной
эвакуации. Расстояние от них до ракеты, стоящей
на старте, составляет всего несколько метров. Движение ракеты на начальном
участке само по себе обладает характерными особенностями, требующими решения
ряда проблемных задач в областях конструирования, динамики, управления.
Кроме того, сама ракета и режимы ее работы на начальном участке имеют ряд
свойств и особенностей, усугубляющих трудности решения задачи о безударном
движении.
Одна из особенностей -
несимметричность ракеты и связанный с ней
эксцентриситет равнодействующей сил тяг
двигателей. В силу этого обстоятельства на
ракету, даже при отсутствии каких-либо
дополнительных возмущений, действует момент,
разворачивающий ракету на неуправляемом
участке. Вследствие этого при первом летном
испытании "Энергии" к моменту включения
автомата стабилизации ракета наклонилась на 3
градуса в плоскости тангажа, что было отмечено
многими специалистами, даже наблюдавшими за
пуском по телевизору (см. самый нижний кадр кинограммы,
представленной справа - webмастер).
Второе, очень важное
обстоятельство - необходимость обеспечения
безударного движения при возникновении на самой
ранней стадии начального участка нештатной
ситуации, связанной с нештатным отключением
одного из двигателей первой ступени. В этом
случае существенно усложняется задача
обеспечения безударного движения. Это
объясняется тем, что, во-первых, увеличивается
эксцентриситет тяги примерно на порядок по
сравнению со штатным случаем и, соответственно,
возмущающий момент и, во-вторых, заметно
уменьшается тяговооруженность. В связи с этим
увеличивается время выхода ракеты из стартового
блока или, иными словами, время действия
возмущающего момента на неуправляемом участке.
Следующая особенность, о которой
упоминалось выше, приобретающая вполне
конкретное содержание в свете возможности
возникновения нештатной ситуации, -близость
наземных сооружений стартового комплекса. При
этом следует отметить, что наиболее опасные
варианты нештатных ситуаций возникают при
выключении двигателей либо на блоке 20А, либо 30А,
так как возникающие при этом возмущающие моменты
обусловливают наклон ракеты в сторону наиболее
близко расположенных сооружений -
соответственно заправочно-дренажной мачты при
отключении тяги на блоке 20А и агрегата
экстренной эвакуации на блоке 30А. При этом
возможность управления ракетой ограничена
колонной пневмогидросвязи, наличие которой не
позволяет немедленно после выхода из
стыковочного блока начать энергичный маневр по
обеспечению безударного движения.
Что же касается нештатных ситуаций,
обусловленных выключением двигателей на одном
из блоков 10А и 40А, то они, хотя и требуют
формирования законов управления, не приобретают
проблемного характера, так как "опасными" в
этих случаях сооружениями являются
молниеприемники, которые находятся на
значительно большем расстоянии от ракеты, чем
заправочно-дренажная мачта и агрегат экстренной
эвакуации.
Еще одна особенность - наличие
возмущающих воздействий, не связанных с
нештатными ситуациями, но становящихся
достаточно заметными при действии:
- наклонения ракеты ветровыми
нагрузками;
- погрешности установки на ракете
двигателей;
- погрешности перемещений штоков
рулевых приводов;
- разбросов массово-центровочных,
аэродинамических характеристик ракеты и тяг
двигателей.
С учетом особенностей старта
"Энергии" решались следующие задачи:
- разработка динамической модели
ракеты применительно ко всем этапам начального
участка движения;
- нахождение и реализация способов
обеспечения безударности движения на
неуправляемом этапе и формирование
благоприятных кинематических параметров ракеты
на момент включения автомата стабилизации;
- формирование закона управления
на управляемом этапе, обеспечивающего
безударное движение с учетом возможности
возникновения нештатной ситуации и действия
возмущающих факторов.
Все эти задачи были в принципе
решены при проектных разработках, а первые
летные испытания "Энергии" показали полное
качественное и количественное соответствие
расчетных данных применительно к штатному
старту с данными летных испытаний и подтвердили
правильность принятой концепции старта.
Отказ от системы сопровождения
означал новый этап в решении проблемы динамики
старта. Это позволило:
- упростить и облегчить систему
"ракета - стартово-стыковочный блок";
- повысить надежность старта;
- получить более четкий способ
управления ракетой на начальном участке за счет
сокращения заневоленного участка.
Возможность обеспечения
безударного движения на этапе выхода из
стартового блока без системы сопровождения и
формирования требуемых кинематических
параметров на момент включения автомата
стабилизации вытекает из того обстоятельства,
что действие со стороны системы сопровождения, в
принципе, может быть воспроизведено с помощью
отклонения вектора тяги. Действительно, при
отклонении этой силы на некоторый угол
появляется поперечная составляющая, а
продольная составляющая практически не
изменяется при достаточно малом угле. Очевидно,
если этот угол изменять во времени таким образом,
чтобы поперечная составляющая тяги изменилась
по такому же закону, как и сила со стороны системы
сопровождения при конкретной нештатной ситуации
и детерминированных возмущениях, то будет
осуществлено, если пренебречь разностью по
высоте точек приложения двух сравнительных сил,
равной 1,5 метра, воспроизведение силы со стороны
системы сопровождения, и движение ракеты будет
проходить так же, как и при наличии системы
сопровождения.
Однако такое воспроизведение было
бы очень трудно осуществить: потребовалась бы
сложная программа отклонения камер двигателей.
Но, как показали исследования, такая имитация и
не требуется, достаточно воспроизвести импульс
силы при простейшем законе формирования
поперечной составляющей тяги - за счет
отклонения всех камер всех двигателей или только
первой ступени по каналам тангажа и рыскания на
постоянные углы, определяемые характером
нештатных ситуаций.
Напомним, что приведенные
рассуждения предназначались для обоснования
принципиальной возможности отказа от системы
сопровождения и как бы передачи ее функции на
органы управления. На самом деле воспроизведение
силы возмущения с их помощью со стороны системы
сопровождения не является обязательным.
Наоборот, этот метод является более гибким,
потому что он не связан с формированием
однозначного закона изменения поперечных сил и
позволяет как обеспечить безударное движение на
этапе выхода из стартового блока, так и
сформировать кинематические параметры ракеты на
момент включения автомата стабилизации. В
частности, этот метод позволяет начинать
управление сразу после схода со шпилек, когда
ракета становится свободной.
В результате был решен комплекс
научно-технических задач, составляющих проблему
динамики старта:
- разработана математическая
модель ракеты, описывающая ее движение на всех
фазах начального участка траектории,
учитывающая упругость элементов конструкции,
упругость стартово-стыковочного блока,
подвижность жидкого наполнения баков, а также
всю совокупность действующих возмущений и
разбросов характеристик ракеты. Проведен расчет
параметров математической модели ракеты
применительно к штатной и нештатной ситуациям;
- внедрен способ компенсации
возмущений при отказах двигателей первой
ступени на начальном этапе движения, позволяющий
исключить применение специальных
гидромеханических ограничителей поперечных
движений хвостовой части ракеты в нештатных
ситуациях (системы сопровождения); произведен
расчет компенсирующих воздействий для ввода их в
систему управления. Это мероприятие позволило
упростить конструкцию, уменьшить объем
экспериментальной отработки, повысить
надежность, снизить материальные затраты;
- произведен расчет
кинематических параметров, учитывающий все
степени свободы ракеты, для использования их в
качестве начальных условий на момент включения
автомата стабилизации;
- предложен и реализован метод
программного управления ракетой в нештатных
ситуациях, обусловленных отказом двигателей
первой ступени в процессе их запуска, по которому
программные функции углов тангажа и рыскания
определяются номером бланка, на котором
произошел отказ двигателя и пространственной
конфигурации сооружений стартового комплекса;
Первый пуск "Энергии"
полностью подтвердил правильность
разработанной концепции старта при штатном
функционировании двигателей.
Далее...